There are two big types of Lie algebras that we want to take care of right up front, and both of them are defined similarly. We remember that if  and
and  are ideals of a Lie algebra
are ideals of a Lie algebra  , then
, then ![[I,J]](https://s0.wp.com/latex.php?latex=%5BI%2CJ%5D&bg=e6e6e6&fg=333333&s=0&c=20201002) — the collection spanned by brackets of elements of and — is also an ideal of . And since the bracket of any element of with any element of is back in , we can see that
— the collection spanned by brackets of elements of and — is also an ideal of . And since the bracket of any element of with any element of is back in , we can see that ![[I,J]\subseteq I](https://s0.wp.com/latex.php?latex=%5BI%2CJ%5D%5Csubseteq+I&bg=e6e6e6&fg=333333&s=0&c=20201002) . Similarly we conclude
. Similarly we conclude ![[I,J]\subseteq J](https://s0.wp.com/latex.php?latex=%5BI%2CJ%5D%5Csubseteq+J&bg=e6e6e6&fg=333333&s=0&c=20201002) , so
, so ![[I,J]\subseteq I\cap J](https://s0.wp.com/latex.php?latex=%5BI%2CJ%5D%5Csubseteq+I%5Ccap+J&bg=e6e6e6&fg=333333&s=0&c=20201002) .
.
Now, starting from we can build up a tower of ideals starting with  and moving down by
and moving down by ![L^{(n+1)}=[L^{(n)},L^{(n)}]\subseteq L^{(n)}](https://s0.wp.com/latex.php?latex=L%5E%7B%28n%2B1%29%7D%3D%5BL%5E%7B%28n%29%7D%2CL%5E%7B%28n%29%7D%5D%5Csubseteq+L%5E%7B%28n%29%7D&bg=e6e6e6&fg=333333&s=0&c=20201002) . We call this the “derived series” of . If this tower eventually bottoms out at
. We call this the “derived series” of . If this tower eventually bottoms out at  we say that is “solvable”. If is abelian we see that
we say that is “solvable”. If is abelian we see that ![L^{(1)}=[L,L]=0](https://s0.wp.com/latex.php?latex=L%5E%7B%281%29%7D%3D%5BL%2CL%5D%3D0&bg=e6e6e6&fg=333333&s=0&c=20201002) , so is automatically solvable. At the other extreme, if is simple — and thus not abelian — the only possibility is
, so is automatically solvable. At the other extreme, if is simple — and thus not abelian — the only possibility is ![[L,L]=L](https://s0.wp.com/latex.php?latex=%5BL%2CL%5D%3DL&bg=e6e6e6&fg=333333&s=0&c=20201002) , so the derived series never gets down to , and thus is not solvable.
, so the derived series never gets down to , and thus is not solvable.
We can build up another tower, again starting with  , but this time moving down by
, but this time moving down by ![L^{n+1}=[L,L^n]](https://s0.wp.com/latex.php?latex=L%5E%7Bn%2B1%7D%3D%5BL%2CL%5En%5D&bg=e6e6e6&fg=333333&s=0&c=20201002) . We call this the “lower central series” or “descending central series” of . If this tower eventually bottoms out at we say that is “nilpotent”. Just as above we see that abelian Lie algebras are automatically nilpotent, while simple Lie algebras are never nilpotent.
. We call this the “lower central series” or “descending central series” of . If this tower eventually bottoms out at we say that is “nilpotent”. Just as above we see that abelian Lie algebras are automatically nilpotent, while simple Lie algebras are never nilpotent.
It’s not too hard to see that  for all
for all  . Indeed,
. Indeed,  to start. Then if
to start. Then if  then
then
![\displaystyle\begin{aligned}L^{(n+1)}&\subseteq [L^{(n)},L^{(n)}]\\&\subseteq [L,L^n]\\&=L^{n+1}\end{aligned}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%5Cbegin%7Baligned%7DL%5E%7B%28n%2B1%29%7D%26%5Csubseteq+%5BL%5E%7B%28n%29%7D%2CL%5E%7B%28n%29%7D%5D%5C%5C%26%5Csubseteq+%5BL%2CL%5En%5D%5C%5C%26%3DL%5E%7Bn%2B1%7D%5Cend%7Baligned%7D&bg=e6e6e6&fg=333333&s=0&c=20201002)
so the assertion follows by induction. Thus we see that any nilpotent algebra is solvable, but solvable algebras are not necessarily nilpotent.
As some explicit examples, we look back at the algebras  and
and  . The second, as we might guess, is nilpotent, and thus solvable. The first, though, is merely solvable.
. The second, as we might guess, is nilpotent, and thus solvable. The first, though, is merely solvable.
First, let’s check that  is nilpotent. The obvious basis consists of all the matrix entries
is nilpotent. The obvious basis consists of all the matrix entries  with
with  , and we can know that
, and we can know that
![\displaystyle[e_{ij},e_{kl}]=\delta_{jk}e_{il}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%5Be_%7Bij%7D%2Ce_%7Bkl%7D%5D%3D%5Cdelta_%7Bjk%7De_%7Bil%7D&bg=e6e6e6&fg=333333&s=0&c=20201002)
We have an obvious sense of the “level” of an element: the difference  , which is well-defined on each basis element. We can tell that the bracket of two basis elements gives either zero or another basis element whose level is the sum of the levels of the first two basis elements. The ideal
, which is well-defined on each basis element. We can tell that the bracket of two basis elements gives either zero or another basis element whose level is the sum of the levels of the first two basis elements. The ideal  is spanned by all the basis elements of level
is spanned by all the basis elements of level  . The ideal
. The ideal  is then spanned by basis elements of level
is then spanned by basis elements of level  . And so it goes, each
. And so it goes, each  spanned by basis elements of level
spanned by basis elements of level  . But this must run out soon enough, since the highest possible level is
. But this must run out soon enough, since the highest possible level is  . In terms of the matrix, elements of
. In terms of the matrix, elements of  are zero everywhere on or below the diagonal; elements of are also zero one row above the diagonal; and so on, each step pushing the nonzero elements “off the edge” to the upper-right of the matrix. Thus is nilpotent, and thus solvable as well.
are zero everywhere on or below the diagonal; elements of are also zero one row above the diagonal; and so on, each step pushing the nonzero elements “off the edge” to the upper-right of the matrix. Thus is nilpotent, and thus solvable as well.
Turning to  , we already know that
, we already know that ![L^{(1)}=[L,L]=\mathfrak{n}(n,\mathbb{F})](https://s0.wp.com/latex.php?latex=L%5E%7B%281%29%7D%3D%5BL%2CL%5D%3D%5Cmathfrak%7Bn%7D%28n%2C%5Cmathbb%7BF%7D%29&bg=e6e6e6&fg=333333&s=0&c=20201002) , which we just showed to be solvable! We see that
, which we just showed to be solvable! We see that  , which will eventually bottom out at , thus is solvable as well. However, we can also calculate that
, which will eventually bottom out at , thus is solvable as well. However, we can also calculate that
![\displaystyle\begin{aligned}L^2&=[L,L^1]\\&=[\mathfrak{t}(n,\mathbb{F}),\mathfrak{n}(n,\mathbb{F})]\\&=\mathfrak{n}(n,\mathbb{F})\\&=L^1\end{aligned}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%5Cbegin%7Baligned%7DL%5E2%26%3D%5BL%2CL%5E1%5D%5C%5C%26%3D%5B%5Cmathfrak%7Bt%7D%28n%2C%5Cmathbb%7BF%7D%29%2C%5Cmathfrak%7Bn%7D%28n%2C%5Cmathbb%7BF%7D%29%5D%5C%5C%26%3D%5Cmathfrak%7Bn%7D%28n%2C%5Cmathbb%7BF%7D%29%5C%5C%26%3DL%5E1%5Cend%7Baligned%7D&bg=e6e6e6&fg=333333&s=0&c=20201002)
and so the derived series of stops after the first term and never reaches . Thus this algebra is solvable, but not nilpotent.
August 20, 2012
Posted by John Armstrong |
Algebra, Lie Algebras |
4 Comments
Let’s pause and catch our breath with an actual example of some of the things we’ve been talking about. Specifically, we’ll consider  — the special linear Lie algebra on a two-dimensional vector space. This is a nice example not only because it’s nicely representative of some general phenomena, but also because the algebra itself is three-dimensional, which helps keep clear the distinction between as a Lie algebra and the adjoint action of on itself, particularly since these are both thought of in terms of matrix multiplications.
— the special linear Lie algebra on a two-dimensional vector space. This is a nice example not only because it’s nicely representative of some general phenomena, but also because the algebra itself is three-dimensional, which helps keep clear the distinction between as a Lie algebra and the adjoint action of on itself, particularly since these are both thought of in terms of matrix multiplications.
Now, we know a basis for this algebra:
which we will take in this order. We want to check each of the brackets of these basis elements:
![\displaystyle\begin{aligned}{}[h,x]&=2x\\ [h,y]&=-2y\\ [x,y]&=h\end{aligned}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%5Cbegin%7Baligned%7D%7B%7D%5Bh%2Cx%5D%26%3D2x%5C%5C+%5Bh%2Cy%5D%26%3D-2y%5C%5C+%5Bx%2Cy%5D%26%3Dh%5Cend%7Baligned%7D&bg=e6e6e6&fg=333333&s=0&c=20201002)
Writing out each bracket of basis elements as a (unique) linear combination of basis elements specifies the bracket completely, by linearity. We call the coefficients the “structure constants” of , and they determine the algebra up to isomorphism.
Okay, now we want to use this basis of the vector space and write down matrices for the action of  on :
on :

Now, both and  are nilpotent. In the case of
are nilpotent. In the case of  we can see that sends the line spanned by
we can see that sends the line spanned by  to the line spanned by
to the line spanned by  , the line spanned by to the line spanned by , and the line spanned by to zero. So we can calculate the powers:
, the line spanned by to the line spanned by , and the line spanned by to zero. So we can calculate the powers:

and the exponential:

Similarly we can calculate the exponential of :

So now it’s a simple matter to write down the following element of  :
:

In other words,  ,
,  , and
, and  .
.
We can also see that and  themselves are also nilpotent, as endomorphisms of the vector space
themselves are also nilpotent, as endomorphisms of the vector space  . We can calculate their exponentials:
. We can calculate their exponentials:
and the product:

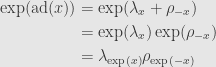
It’s easy to check from here that conjugation by  has the exact same effect as the action of
has the exact same effect as the action of  :
:  .
.
This is a very general phenomenon: if  is any linear Lie algebra and
is any linear Lie algebra and  is nilpotent, then conjugation by the exponential of is the same as applying the exponential of the adoint of .
is nilpotent, then conjugation by the exponential of is the same as applying the exponential of the adoint of .
Indeed, considering  , we can write it as
, we can write it as

where  and
and  are left- and right-multiplication by in
are left- and right-multiplication by in  . Since these two commute with each other and both are nilpotent we can write
. Since these two commute with each other and both are nilpotent we can write
That is, the action of  is the same as left-multiplication by
is the same as left-multiplication by  followed by right-multiplication by
followed by right-multiplication by  . All we need now is to verify that this is the inverse of , but the expanded Leibniz identity from last time tells us that
. All we need now is to verify that this is the inverse of , but the expanded Leibniz identity from last time tells us that  , thus proving our assertion.
, thus proving our assertion.
We can also tell at this point that the nilpotency of and and that of and are not unrelated. Indeed, if  is nilpotent then
is nilpotent then  is, too. Indeed, since and are commuting nilpotents, their difference —
is, too. Indeed, since and are commuting nilpotents, their difference —  — is again nilpotent.
— is again nilpotent.
We must be careful to note that the converse is not true. Indeed,  is ad-nilpotent, but
is ad-nilpotent, but  itself is certainly not nilpotent.
itself is certainly not nilpotent.
August 18, 2012
Posted by John Armstrong |
Algebra, Lie Algebras |
1 Comment
Sorry for the delay; I’ve had a couple busy days. Here’s Thursday’s promised installment.
An automorphism of a Lie algebra is, as usual, an invertible homomorphism from onto itself, and the collection of all such automorphisms forms a group  .
.
One obviously useful class of examples arises when we’re considering a linear Lie algebra . If  is an invertible endomorphism of
is an invertible endomorphism of  such that
such that  then the map
then the map  is an automorphism of . Clearly this happens for all
is an automorphism of . Clearly this happens for all  in the cases of
in the cases of  and the special linear Lie algebra
and the special linear Lie algebra  — the latter because the trace is invariant under a change of basis.
— the latter because the trace is invariant under a change of basis.
Now we’ll specialize to the (usual) case where no multiple of  is zero, and we consider an for which is “nilpotent”. That is, there’s some finite such that
is zero, and we consider an for which is “nilpotent”. That is, there’s some finite such that  — applying
— applying ![y\mapsto[x,y]](https://s0.wp.com/latex.php?latex=y%5Cmapsto%5Bx%2Cy%5D&bg=e6e6e6&fg=333333&s=0&c=20201002) sufficiently many times eventually kills off every element of . In this case, we say that itself is “ad-nilpotent”.
sufficiently many times eventually kills off every element of . In this case, we say that itself is “ad-nilpotent”.
In this case, we can define . How does this work? we use the power series expansion of the exponential:
We know that this series converges because eventually every term vanishes once  .
.
Now, I say that  . In fact, while this case is very useful, all we need from is that it’s a nilpotent derivation
. In fact, while this case is very useful, all we need from is that it’s a nilpotent derivation  of . The product rule for derivations generalizes as:
of . The product rule for derivations generalizes as:

So we can write
That is,  preserves the multiplication of the algebra that is a derivation of. In particular, in terms of the Lie algebra , we find that
preserves the multiplication of the algebra that is a derivation of. In particular, in terms of the Lie algebra , we find that
![\displaystyle[\exp(\delta(x)),\exp(\delta(y))]=\exp(\delta([x,y]))](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%5B%5Cexp%28%5Cdelta%28x%29%29%2C%5Cexp%28%5Cdelta%28y%29%29%5D%3D%5Cexp%28%5Cdelta%28%5Bx%2Cy%5D%29%29&bg=e6e6e6&fg=333333&s=0&c=20201002)
Since  we conclude that this is an epimorphism of . It’s invertible by the usual formula
we conclude that this is an epimorphism of . It’s invertible by the usual formula

which means it’s an automorphism of .
Just like a derivation of the form is called inner, an automorphism of the form is called an inner automorphism, and the subgroup  they generate is a normal subgroup of . Specifically, if
they generate is a normal subgroup of . Specifically, if  and then we can calculate
and then we can calculate
![\displaystyle\begin{aligned}\phi(\mathrm{ad}(x)(\phi^{-1}(y)))&=\phi([x,\phi^{-1}(y)])\\&=[\phi(x),y]\\&=\mathrm{ad}(\phi(x))(y)\end{aligned}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%5Cbegin%7Baligned%7D%5Cphi%28%5Cmathrm%7Bad%7D%28x%29%28%5Cphi%5E%7B-1%7D%28y%29%29%29%26%3D%5Cphi%28%5Bx%2C%5Cphi%5E%7B-1%7D%28y%29%5D%29%5C%5C%26%3D%5B%5Cphi%28x%29%2Cy%5D%5C%5C%26%3D%5Cmathrm%7Bad%7D%28%5Cphi%28x%29%29%28y%29%5Cend%7Baligned%7D&bg=e6e6e6&fg=333333&s=0&c=20201002)
and thus

so the conjugate of an inner automorphism is again inner.
August 18, 2012
Posted by John Armstrong |
Algebra, Lie Algebras |
3 Comments
The category of Lie algebras may not be Abelian, but it has a zero object, kernels, and cokernels, which is enough to get the first isomorphism theorem, just like for rings. Specifically, if  is any homomorphism of Lie algebras then we can factor it as follows:
is any homomorphism of Lie algebras then we can factor it as follows:

That is, first we project down to the quotient of by the kernel of  , then we have an isomorphism from this quotient to the image of , followed by the inclusion of the image as a subalgebra of
, then we have an isomorphism from this quotient to the image of , followed by the inclusion of the image as a subalgebra of  .
.
There are actually two more isomorphism theorems which I haven’t made much mention of, though they hold in other categories as well. Since we’ll have use of them in our study of Lie algebras, we may as well get them down now.
The second isomorphism theorem says that if  are both ideals of , then
are both ideals of , then  is an ideal of
is an ideal of  . Further, there is a natural isomorphism
. Further, there is a natural isomorphism  . Indeed, if
. Indeed, if  and
and  , then we can check that
, then we can check that
![\displaystyle[x+I,j+I]=[x,j]+I\in J/I](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%5Bx%2BI%2Cj%2BI%5D%3D%5Bx%2Cj%5D%2BI%5Cin+J%2FI&bg=e6e6e6&fg=333333&s=0&c=20201002)
so is an ideal of . As for the isomorphism, it’s straightforward from considering and as vector subspaces of . Indeed, saying  and
and  are equivalent modulo in is to say that
are equivalent modulo in is to say that  . But this means that
. But this means that  for some
for some  , so and are equivalent modulo in .
, so and are equivalent modulo in .
The third isomorphism theorem states that if and are any two ideals of , then there is a natural isomorphism between  and
and  — we showed last time that both
— we showed last time that both  and
and  are ideals. To see this, take
are ideals. To see this, take  and
and  in and consider how they can be equivalent modulo . First off,
in and consider how they can be equivalent modulo . First off,  and
and  are immediately irrelevant, so we may as well just ask how
are immediately irrelevant, so we may as well just ask how  and
and  can be equivalent modulo . Well, this will happen if
can be equivalent modulo . Well, this will happen if  , but we know that their difference is also in , so
, but we know that their difference is also in , so  .
.
August 15, 2012
Posted by John Armstrong |
Algebra, Lie Algebras |
1 Comment
We’d like to see that the category of Lie algebras is Abelian. Unfortunately, it isn’t, but we can come close. It should be clear that it’s an  -category, since the homomorphisms between any two Lie algebras form a vector space. Direct sums are also straightforward: the Lie algebra
-category, since the homomorphisms between any two Lie algebras form a vector space. Direct sums are also straightforward: the Lie algebra  is the direct sum as vector spaces, with
is the direct sum as vector spaces, with ![[l,l']=0](https://s0.wp.com/latex.php?latex=%5Bl%2Cl%27%5D%3D0&bg=e6e6e6&fg=333333&s=0&c=20201002) for
for  and
and  and the regular brackets on and otherwise.
and the regular brackets on and otherwise.
We’ve seen that the category of Lie algebras has a zero object and kernels; now we need cokernels. It would be nice to just say that if is a homomorphism then  is the quotient of by the image of , but this image may not be an ideal. Luckily, ideals have a few nice closure properties.
is the quotient of by the image of , but this image may not be an ideal. Luckily, ideals have a few nice closure properties.
First off, if and are ideals of , then — the subspace spanned by brackets of elements of and — is also an ideal. Indeed, we can check that ![[[i,j],x]=[[i,x],j]+[i,[j,x]]](https://s0.wp.com/latex.php?latex=%5B%5Bi%2Cj%5D%2Cx%5D%3D%5B%5Bi%2Cx%5D%2Cj%5D%2B%5Bi%2C%5Bj%2Cx%5D%5D&bg=e6e6e6&fg=333333&s=0&c=20201002) which is back in . Similarly, the subspace sum is an ideal. And, most importantly for us now, the intersection is an ideal, since if
which is back in . Similarly, the subspace sum is an ideal. And, most importantly for us now, the intersection is an ideal, since if  then both
then both ![[i,x]\in I](https://s0.wp.com/latex.php?latex=%5Bi%2Cx%5D%5Cin+I&bg=e6e6e6&fg=333333&s=0&c=20201002) and
and ![[i,x]\in J](https://s0.wp.com/latex.php?latex=%5Bi%2Cx%5D%5Cin+J&bg=e6e6e6&fg=333333&s=0&c=20201002) , so
, so ![[i,x]\in I\cap J](https://s0.wp.com/latex.php?latex=%5Bi%2Cx%5D%5Cin+I%5Ccap+J&bg=e6e6e6&fg=333333&s=0&c=20201002) as well. In fact, this is true of arbitrary intersections.
as well. In fact, this is true of arbitrary intersections.
This is important, because it means we can always expand any subset  to an ideal. We take all the ideals of that contain
to an ideal. We take all the ideals of that contain  and intersect them. This will then be another ideal of containing , and it is contained in all the others. And we know that this intersection is nonempty, since there’s always at least the ideal .
and intersect them. This will then be another ideal of containing , and it is contained in all the others. And we know that this intersection is nonempty, since there’s always at least the ideal .
So while  may not be an ideal of , we can expand it to an ideal and take the quotient. The projection onto this quotient will be the largest epimorphism of that sends everything in to zero, so it will be the cokernel of .
may not be an ideal of , we can expand it to an ideal and take the quotient. The projection onto this quotient will be the largest epimorphism of that sends everything in to zero, so it will be the cokernel of .
Where everything falls apart is normality. The very fact that we have ideals as a separate concept from subalgebras is the problem. Any subalgebra is the image of a monomorphism — the inclusion, if nothing else. But not all these subalgebras are themselves kernels of other morphisms; only those that are ideals have this property.
Still, the category is very nice, and these properties will help us greatly in what follows.
August 14, 2012
Posted by John Armstrong |
Algebra, Lie Algebras |
3 Comments
As we said, a homomorphism of Lie algebras is simply a linear mapping between them that preserves the bracket. I want to check, though, that this behaves in certain nice ways.
First off, there is a Lie algebra . That is, the trivial vector space can be given a (unique) Lie algebra structure, and every Lie algebra has a unique homomorphism  and a unique homomorphism
and a unique homomorphism  . This is easy.
. This is easy.
Also pretty easy is the fact that we have kernels. That is, if is a homomorphism, then the set  is a subalgebra of . Indeed, it’s actually an “ideal” in pretty much the same sense as for rings. That is, if and
is a subalgebra of . Indeed, it’s actually an “ideal” in pretty much the same sense as for rings. That is, if and  then
then ![[x,y]\in I](https://s0.wp.com/latex.php?latex=%5Bx%2Cy%5D%5Cin+I&bg=e6e6e6&fg=333333&s=0&c=20201002) . And we can check that
. And we can check that
![\displaystyle\phi\left([x,y]\right)=\left[\phi(x),\phi(y)\right]=\left[\phi(x),0\right]=0](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%5Cphi%5Cleft%28%5Bx%2Cy%5D%5Cright%29%3D%5Cleft%5B%5Cphi%28x%29%2C%5Cphi%28y%29%5Cright%5D%3D%5Cleft%5B%5Cphi%28x%29%2C0%5Cright%5D%3D0&bg=e6e6e6&fg=333333&s=0&c=20201002)
proving that  is an ideal, and thus a Lie algebra in its own right.
is an ideal, and thus a Lie algebra in its own right.
Every Lie algebra has two trivial ideals:  and
and  . Another example is the “center” — in analogy with the center of a group — which is the collection
. Another example is the “center” — in analogy with the center of a group — which is the collection  of all
of all  such that
such that ![[x,z]=0](https://s0.wp.com/latex.php?latex=%5Bx%2Cz%5D%3D0&bg=e6e6e6&fg=333333&s=0&c=20201002) for all . That is, those for which the adjoint action
for all . That is, those for which the adjoint action  is the zero derivation — the kernel of
is the zero derivation — the kernel of  — which is clearly an ideal.
— which is clearly an ideal.
If  we say — again in analogy with groups — that is abelian; this is the case for the diagonal algebra
we say — again in analogy with groups — that is abelian; this is the case for the diagonal algebra  , for instance. Abelian Lie algebras are rather boring; they’re just vector spaces with trivial brackets, so we can always decompose them by picking a basis — any basis — and getting a direct sum of one-dimensional abelian Lie algebras.
, for instance. Abelian Lie algebras are rather boring; they’re just vector spaces with trivial brackets, so we can always decompose them by picking a basis — any basis — and getting a direct sum of one-dimensional abelian Lie algebras.
On the other hand, if the only ideals of are the trivial ones, and if is not abelian, then we say that is “simple”. These are very interesting, indeed.
As usual for rings, we can construct quotient algebras. If  is an ideal, then we can define a Lie algebra structure on the quotient space . Indeed, if and are equivalence classes modulo , then we define
is an ideal, then we can define a Lie algebra structure on the quotient space . Indeed, if and are equivalence classes modulo , then we define
![\displaystyle [x+I,y+I]=[x,y]+I](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Bx%2BI%2Cy%2BI%5D%3D%5Bx%2Cy%5D%2BI&bg=e6e6e6&fg=333333&s=0&c=20201002)
which is unambiguous since if  and
and  are two other representatives then
are two other representatives then  and
and  , and we calculate
, and we calculate
![\displaystyle [x',y']=[x+i,y+j]=[x,y]+\left([x,j]+[i,y]+[i,j]\right)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Bx%27%2Cy%27%5D%3D%5Bx%2Bi%2Cy%2Bj%5D%3D%5Bx%2Cy%5D%2B%5Cleft%28%5Bx%2Cj%5D%2B%5Bi%2Cy%5D%2B%5Bi%2Cj%5D%5Cright%29&bg=e6e6e6&fg=333333&s=0&c=20201002)
and everything in the parens on the right is in .
Two last constructions in analogy with groups: the “normalizer” of a subspace  is the subalgebra
is the subalgebra ![N_L(K)=\left\{x\in L\vert[x,K]\in K\right\}](https://s0.wp.com/latex.php?latex=N_L%28K%29%3D%5Cleft%5C%7Bx%5Cin+L%5Cvert%5Bx%2CK%5D%5Cin+K%5Cright%5C%7D&bg=e6e6e6&fg=333333&s=0&c=20201002) . This is the largest subalgebra of which contains
. This is the largest subalgebra of which contains  as an ideal; if already is an ideal of then
as an ideal; if already is an ideal of then  ; if
; if  we say that is “self-normalizing”.
we say that is “self-normalizing”.
The “centralizer” of a subset is the subalgebra ![C_L(X)=\left\{x\in L\vert[x,X]=0\right\}](https://s0.wp.com/latex.php?latex=C_L%28X%29%3D%5Cleft%5C%7Bx%5Cin+L%5Cvert%5Bx%2CX%5D%3D0%5Cright%5C%7D&bg=e6e6e6&fg=333333&s=0&c=20201002) . This is a subalgebra, and in particular we can see that
. This is a subalgebra, and in particular we can see that  .
.
August 13, 2012
Posted by John Armstrong |
Algebra, Lie Algebras |
4 Comments
When first defining (or, rather, recalling the definition of) Lie algebras I mentioned that the bracket makes each element of a Lie algebra act by derivations on itself. We can actually say a bit more about this.
First off, we need an algebra  over a field
over a field  . This doesn’t have to be associative, as our algebras commonly are; all we need is a bilinear map
. This doesn’t have to be associative, as our algebras commonly are; all we need is a bilinear map  . In particular, Lie algebras count.
. In particular, Lie algebras count.
Now, a derivation of is firstly a linear map from back to itself. That is,  , where this is the algebra of endomorphisms of as a vector space over , not the endomorphisms as an algebra. Instead of preserving the multiplication, we impose the condition that behave like the product rule:
, where this is the algebra of endomorphisms of as a vector space over , not the endomorphisms as an algebra. Instead of preserving the multiplication, we impose the condition that behave like the product rule:

It’s easy to see that the collection  is a vector subspace, but I say that it’s actually a Lie subalgebra, when we equip the space of endomorphisms with the usual commutator bracket. That is, if and
is a vector subspace, but I say that it’s actually a Lie subalgebra, when we equip the space of endomorphisms with the usual commutator bracket. That is, if and  are two derivations, I say that their commutator is again a derivation.
are two derivations, I say that their commutator is again a derivation.
This, we can check:
=&\delta(\partial(ab))-\partial(\delta(ab))\\=&\delta(\partial(a)b+a\partial(b)))-\partial(\delta(a)b+a\delta(b)))\\=&\delta(\partial(a)b)+\delta(a\partial(b)))-\partial(\delta(a)b)-\partial(a\delta(b)))\\=&\delta(\partial(a))b+\partial(a)\delta(b)+\delta(a)\partial(b)+a\delta(\partial(b))\\&-\partial(\delta(a))b-\delta(a)\partial(b)-\partial(a)\delta(b)-a\partial(\delta(b))\\=&[\delta,\partial](a)b+a[\delta,\partial](b)\end{aligned}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%5Cbegin%7Baligned%7D+%5B%5Cdelta%2C%5Cpartial%5D%28ab%29%3D%26%5Cdelta%28%5Cpartial%28ab%29%29-%5Cpartial%28%5Cdelta%28ab%29%29%5C%5C%3D%26%5Cdelta%28%5Cpartial%28a%29b%2Ba%5Cpartial%28b%29%29%29-%5Cpartial%28%5Cdelta%28a%29b%2Ba%5Cdelta%28b%29%29%29%5C%5C%3D%26%5Cdelta%28%5Cpartial%28a%29b%29%2B%5Cdelta%28a%5Cpartial%28b%29%29%29-%5Cpartial%28%5Cdelta%28a%29b%29-%5Cpartial%28a%5Cdelta%28b%29%29%29%5C%5C%3D%26%5Cdelta%28%5Cpartial%28a%29%29b%2B%5Cpartial%28a%29%5Cdelta%28b%29%2B%5Cdelta%28a%29%5Cpartial%28b%29%2Ba%5Cdelta%28%5Cpartial%28b%29%29%5C%5C%26-%5Cpartial%28%5Cdelta%28a%29%29b-%5Cdelta%28a%29%5Cpartial%28b%29-%5Cpartial%28a%29%5Cdelta%28b%29-a%5Cpartial%28%5Cdelta%28b%29%29%5C%5C%3D%26%5B%5Cdelta%2C%5Cpartial%5D%28a%29b%2Ba%5B%5Cdelta%2C%5Cpartial%5D%28b%29%5Cend%7Baligned%7D&bg=e6e6e6&fg=333333&s=0&c=20201002)
We’ve actually seen this before. We identified the vectors at a point  on a manifold with the derivations of the (real) algebra of functions defined in a neighborhood of , so we need to take the commutator of two derivations to be sure of getting a new derivation back.
on a manifold with the derivations of the (real) algebra of functions defined in a neighborhood of , so we need to take the commutator of two derivations to be sure of getting a new derivation back.
So now we can say that the mapping that sends to the endomorphism lands in  because of the Jacobi identity. We call this mapping the “adjoint representation” of , and indeed it’s actually a homomorphism of Lie algebras. That is,
because of the Jacobi identity. We call this mapping the “adjoint representation” of , and indeed it’s actually a homomorphism of Lie algebras. That is, ![\mathrm{ad}([x,y])=[\mathrm{ad}(x),\mathrm{ad}(y)]](https://s0.wp.com/latex.php?latex=%5Cmathrm%7Bad%7D%28%5Bx%2Cy%5D%29%3D%5B%5Cmathrm%7Bad%7D%28x%29%2C%5Cmathrm%7Bad%7D%28y%29%5D&bg=e6e6e6&fg=333333&s=0&c=20201002) . The endomorphism on the left-hand side sends to
. The endomorphism on the left-hand side sends to ![[[x,y],z]](https://s0.wp.com/latex.php?latex=%5B%5Bx%2Cy%5D%2Cz%5D&bg=e6e6e6&fg=333333&s=0&c=20201002) , while on the right-hand side we get
, while on the right-hand side we get ![[x,[y,z]]-[y,[x,z]]](https://s0.wp.com/latex.php?latex=%5Bx%2C%5By%2Cz%5D%5D-%5By%2C%5Bx%2Cz%5D%5D&bg=e6e6e6&fg=333333&s=0&c=20201002) . That these two are equal is yet another application of the Jacobi identity.
. That these two are equal is yet another application of the Jacobi identity.
One last piece of nomenclature: derivations in the image of are called “inner”; all others are called “outer” derivations.
August 10, 2012
Posted by John Armstrong |
Algebra, Lie Algebras |
4 Comments
For the next three families of linear Lie algebras we equip our vector space with a bilinear form  . We’re going to consider the endomorphisms
. We’re going to consider the endomorphisms  such that
such that

If we pick a basis  of , then we have a matrix for the bilinear form
of , then we have a matrix for the bilinear form

and one for the endomorphism

So the condition in terms of matrices in  comes down to
comes down to

or, more abstractly,  .
.
So do these form a subalgebra of ? Linearity is easy; we must check that this condition is closed under the bracket. That is, if  and both satisfy this condition, what about their commutator
and both satisfy this condition, what about their commutator ![[f,g]](https://s0.wp.com/latex.php?latex=%5Bf%2Cg%5D&bg=e6e6e6&fg=333333&s=0&c=20201002) ?
?
,y)&=B(f(g(x))-g(f(x)),y)\\&=B(f(g(x)),y)-B(g(f(x)),y)\\&=-B(g(x),f(y))+B(f(x),g(y))\\&=B(x,g(f(y)))-B(x,f(g(y)))\\&=-B(x,f(g(y))-g(f(y)))\\&=-B(x,[f,g](y))\end{aligned}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%5Cbegin%7Baligned%7DB%28%5Bf%2Cg%5D%28x%29%2Cy%29%26%3DB%28f%28g%28x%29%29-g%28f%28x%29%29%2Cy%29%5C%5C%26%3DB%28f%28g%28x%29%29%2Cy%29-B%28g%28f%28x%29%29%2Cy%29%5C%5C%26%3D-B%28g%28x%29%2Cf%28y%29%29%2BB%28f%28x%29%2Cg%28y%29%29%5C%5C%26%3DB%28x%2Cg%28f%28y%29%29%29-B%28x%2Cf%28g%28y%29%29%29%5C%5C%26%3D-B%28x%2Cf%28g%28y%29%29-g%28f%28y%29%29%29%5C%5C%26%3D-B%28x%2C%5Bf%2Cg%5D%28y%29%29%5Cend%7Baligned%7D&bg=e6e6e6&fg=333333&s=0&c=20201002)
So this condition will always give us a linear Lie algebra.
We have three different families of these algebras. First, we consider the case where  is odd, and we let be the symmetric, nondegenerate bilinear form with matrix
is odd, and we let be the symmetric, nondegenerate bilinear form with matrix

where  is the
is the  identity matrix. If we write the matrix of our endomorphism in a similar form
identity matrix. If we write the matrix of our endomorphism in a similar form

our matrix conditions turn into
From here it’s straightforward to count out  basis elements that satisfy the conditions on the first row and column,
basis elements that satisfy the conditions on the first row and column,  that satisfy the antisymmetry for , another
that satisfy the antisymmetry for , another  that satisfy the antisymmetry for , and
that satisfy the antisymmetry for , and  that satisfy the condition between
that satisfy the condition between  and
and  , for a total of
, for a total of  basis elements. We call this Lie algebra the orthogonal algebra of , and write
basis elements. We call this Lie algebra the orthogonal algebra of , and write  or
or  . Sometimes we refer to the isomorphism class of this algebra as
. Sometimes we refer to the isomorphism class of this algebra as  .
.
Next up, in the case where  is even we let the matrix of look like
is even we let the matrix of look like

A similar approach to that above gives a basis with  elements. We also call this the orthogonal algebra of , and write or
elements. We also call this the orthogonal algebra of , and write or  . Sometimes we refer to the isomorphism class of this algebra as
. Sometimes we refer to the isomorphism class of this algebra as  .
.
Finally, we again take an even-dimensional , but this time we use the skew-symmetric form

This time we get a basis with  elements. We call this the symplectic algebra of , and write
elements. We call this the symplectic algebra of , and write  or
or  . Sometimes we refer to the isomorphism class of this algebra as
. Sometimes we refer to the isomorphism class of this algebra as  .
.
Along with the special linear Lie algebras, these form the “classical” Lie algebras. It’s a tedious but straightforward exercise to check that for any classical Lie algebra , each basis element  of can be written as a bracket of two other elements of . That is, we have . Since for some , and since we know that
of can be written as a bracket of two other elements of . That is, we have . Since for some , and since we know that ![[\mathfrak{gl}(V),\mathfrak{gl}(V)]=\mathfrak{sl}(V)](https://s0.wp.com/latex.php?latex=%5B%5Cmathfrak%7Bgl%7D%28V%29%2C%5Cmathfrak%7Bgl%7D%28V%29%5D%3D%5Cmathfrak%7Bsl%7D%28V%29&bg=e6e6e6&fg=333333&s=0&c=20201002) , this establishes that
, this establishes that  for all classical .
for all classical .
August 9, 2012
Posted by John Armstrong |
Algebra, Lie Algebras |
1 Comment
More examples of Lie algebras! Today, an important family of linear Lie algebras.
Take a vector space with dimension  and start with . Inside this, we consider the subalgebra of endomorphisms whose trace is zero, which we write and call the “special linear Lie algebra”. This is a subspace, since the trace is a linear functional on the space of endomorphisms:
and start with . Inside this, we consider the subalgebra of endomorphisms whose trace is zero, which we write and call the “special linear Lie algebra”. This is a subspace, since the trace is a linear functional on the space of endomorphisms:

so if two endomorphisms have trace zero then so do all their linear combinations. It’s a subalgebra by using the “cyclic” property of the trace:

Note that this does not mean that endomorphisms can be arbitrarily rearranged inside the trace, which is a common mistake after seeing this formula. Anyway, this implies that
![\displaystyle\begin{aligned}\mathrm{Tr}\left([x,y]\right)&=\mathrm{Tr}(xy-yx)\\&=\mathrm{Tr}(xy)-\mathrm{Tr}(yx)=0\end{aligned}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%5Cbegin%7Baligned%7D%5Cmathrm%7BTr%7D%5Cleft%28%5Bx%2Cy%5D%5Cright%29%26%3D%5Cmathrm%7BTr%7D%28xy-yx%29%5C%5C%26%3D%5Cmathrm%7BTr%7D%28xy%29-%5Cmathrm%7BTr%7D%28yx%29%3D0%5Cend%7Baligned%7D&bg=e6e6e6&fg=333333&s=0&c=20201002)
so actually not only is the bracket of two endomorphisms in back in the subspace, the bracket of any two endomorphisms of lands in . In other words: ![\left[\mathfrak{gl}(V),\mathfrak{gl}(V)\right]=\mathfrak{sl}(V)](https://s0.wp.com/latex.php?latex=%5Cleft%5B%5Cmathfrak%7Bgl%7D%28V%29%2C%5Cmathfrak%7Bgl%7D%28V%29%5Cright%5D%3D%5Cmathfrak%7Bsl%7D%28V%29&bg=e6e6e6&fg=333333&s=0&c=20201002) .
.
Choosing a basis, we will write the algebra as  . It should be clear that the dimension is
. It should be clear that the dimension is  , since this is the kernel of a single linear functional on the
, since this is the kernel of a single linear functional on the  -dimensional
-dimensional  , but let’s exhibit a basis anyway. All the basic matrices with
, but let’s exhibit a basis anyway. All the basic matrices with  are traceless, so they’re all in
are traceless, so they’re all in  . Along the diagonal,
. Along the diagonal,  , so we need linear combinations that cancel each other out. It’s particularly convenient to define
, so we need linear combinations that cancel each other out. It’s particularly convenient to define

So we’ve got the basic matrices, but we take away the  along the diagonal. Then we add back the
along the diagonal. Then we add back the  new matrices
new matrices  , getting matrices in our standard basis for , verifying the dimension.
, getting matrices in our standard basis for , verifying the dimension.
We sometimes refer to the isomorphism class of as  . Because reasons.
. Because reasons.
August 8, 2012
Posted by John Armstrong |
Algebra, Lie Algebras |
5 Comments
So now that we’ve remembered what a Lie algebra is, let’s mention the most important ones: linear Lie algebras. These are ones that arise from linear transformations on vector spaces, ’cause mathematicians love them some vector spaces.
Specifically, let be a finite-dimensional vector space over , and consider the associative algebra of endomorphisms — linear transformations from back to itself. We can use the usual method of defining a bracket as a commutator:
![\displaystyle [x,y]=xy-yx](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Bx%2Cy%5D%3Dxy-yx&bg=e6e6e6&fg=333333&s=0&c=20201002)
to turn this into a Lie algebra. When considered as a Lie algebra like this, we call it the “general linear Lie algebra”, and write . Many Lie algebras are written in the Fraktur typeface like this.
Any subalgebra of is called a “linear Lie algebra”, since it’s made up of linear transformations. It turns out that every finite-dimensional Lie algebra is isomorphic to a linear Lie algebra, but we reserve the “linear” term for those algebras which we’re actually thinking of having linear transformations as elements.
Of course, since is a vector space over , we can pick a basis. If has dimension , then there are elements in any basis, and so our endomorphisms correspond to the  matrices
matrices  . When we think of it in these terms, we often write for the general linear Lie algebra.
. When we think of it in these terms, we often write for the general linear Lie algebra.
We can actually calculate the bracket structure explicitly in this case; bilinearity tells us that it suffices to write it down in terms of a basis. The standard basis of is  which has a
which has a  in the
in the  th row and
th row and  th column and elsewhere. So we can calculate:
th column and elsewhere. So we can calculate:
![\displaystyle [e_{ij},e_{kl}]=\delta_{jk}e_{il}-\delta_{li}e_{kj}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Be_%7Bij%7D%2Ce_%7Bkl%7D%5D%3D%5Cdelta_%7Bjk%7De_%7Bil%7D-%5Cdelta_%7Bli%7De_%7Bkj%7D&bg=e6e6e6&fg=333333&s=0&c=20201002)
where, as usual,  is the Kronecker delta: if the indices are the same and if they’re different.
is the Kronecker delta: if the indices are the same and if they’re different.
We can now identify some important subalgebras of . First, the strictly upper-triangular matrices involve only the basis elements with  . If
. If  so the first term in the above expression for the bracket shows up, then the second term cannot show up, and vice versa. Either way, we conclude that the bracket of two basis elements of — and thus any element of this subspace — involves only other basis elements of the subspace, which makes this a subalgebra.
so the first term in the above expression for the bracket shows up, then the second term cannot show up, and vice versa. Either way, we conclude that the bracket of two basis elements of — and thus any element of this subspace — involves only other basis elements of the subspace, which makes this a subalgebra.
Similarly, we conclude that the (non-strictly) upper-triangular matrices involving only with also form a subalgebra . And, finally, the diagonal matrices involving only  also form a subalgebra . This last one is interesting, in that the bracket on is actually trivial, since any two diagonal matrices commute.
also form a subalgebra . This last one is interesting, in that the bracket on is actually trivial, since any two diagonal matrices commute.
As vector spaces, we see that  . It’s easy to check that the bracket of a diagonal matrix and a strictly upper-triangular matrix is again strictly upper-triangular — we write
. It’s easy to check that the bracket of a diagonal matrix and a strictly upper-triangular matrix is again strictly upper-triangular — we write ![[\mathfrak{d}(n,\mathbb{F}),\mathfrak{n}(n,\mathbb{F})]=\mathfrak{n}(n,\mathbb{F})](https://s0.wp.com/latex.php?latex=%5B%5Cmathfrak%7Bd%7D%28n%2C%5Cmathbb%7BF%7D%29%2C%5Cmathfrak%7Bn%7D%28n%2C%5Cmathbb%7BF%7D%29%5D%3D%5Cmathfrak%7Bn%7D%28n%2C%5Cmathbb%7BF%7D%29&bg=e6e6e6&fg=333333&s=0&c=20201002) — and so we also have
— and so we also have ![[\mathfrak{t}(n,\mathbb{F}),\mathfrak{t}(n,\mathbb{F})]=\mathfrak{n}(n,\mathbb{F})](https://s0.wp.com/latex.php?latex=%5B%5Cmathfrak%7Bt%7D%28n%2C%5Cmathbb%7BF%7D%29%2C%5Cmathfrak%7Bt%7D%28n%2C%5Cmathbb%7BF%7D%29%5D%3D%5Cmathfrak%7Bn%7D%28n%2C%5Cmathbb%7BF%7D%29&bg=e6e6e6&fg=333333&s=0&c=20201002) . This may seem a little like a toy example now, but it turns out to be surprisingly general; many subalgebras will relate to each other this way.
. This may seem a little like a toy example now, but it turns out to be surprisingly general; many subalgebras will relate to each other this way.
August 7, 2012
Posted by John Armstrong |
Algebra, Lie Algebras |
7 Comments

