Higher-Order Differentials
Just like we assembled partial derivatives into the differential of a function, so we can assemble higher partial derivatives into higher-order differentials. The differential measures how the function itself changes as we move around, and the higher differentials will measure how lower differentials change.
First let’s look at the second-order differential of a real-valued function 



So, just as we did for vector-valued functions, we’ll just take the differentials of each of these components separately, and then cobble them together.
=\left(d\frac{\partial f}{\partial x^i}\right)dx^i=\left(\frac{\partial^2 f}{\partial x^j\partial x^i}dx^j\right)dx^i](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+d%5Cleft%5Bdf%5Cright%5D%28x%29%3D%5Cleft%28d%5Cfrac%7B%5Cpartial+f%7D%7B%5Cpartial+x%5Ei%7D%5Cright%29dx%5Ei%3D%5Cleft%28%5Cfrac%7B%5Cpartial%5E2+f%7D%7B%5Cpartial+x%5Ej%5Cpartial+x%5Ei%7Ddx%5Ej%5Cright%29dx%5Ei&bg=e6e6e6&fg=333333&s=0&c=20201002)
Now this second displacement may have nothing to do with the first, but it should be the same for all components. That is, we could write out the second differential as a function of not only the point 



Commonly we’ll collapse this into a function of a point and a single displacement. We just put the same vector 
Unfortunately, these higher differentials are more complicated than our first-order derivatives. In particular, they don’t obey anything like Cauchy’s invariant rule, meaning they don’t transform well when we compose functions. As an example, let’s go back and look at the polar coordinate transform again:

We’ve seen how we can use Cauchy’s invariant rule to rewrite differentials:

We can also invert the transformation and rewrite differential operators:

So let’s take our second-order differential

and try to rewrite it. The nasty bit is working out all these second-order partial derivatives in terms of 

![\displaystyle\begin{aligned}\frac{\partial}{\partial x}\frac{\partial}{\partial x}f=&\left[\cos(\theta)\frac{\partial}{\partial r}-\frac{\sin(\theta)}{r}\frac{\partial}{\partial\theta}\right]\left(\cos(\theta)\frac{\partial f}{\partial r}-\frac{\sin(\theta)}{r}\frac{\partial f}{\partial\theta}\right)\\=&\cos(\theta)\frac{\partial}{\partial r}\left(\cos(\theta)\frac{\partial f}{\partial r}-\frac{\sin(\theta)}{r}\frac{\partial f}{\partial\theta}\right)-\frac{\sin(\theta)}{r}\frac{\partial}{\partial\theta}\left(\cos(\theta)\frac{\partial f}{\partial r}-\frac{\sin(\theta)}{r}\frac{\partial f}{\partial\theta}\right)\\=&\left(\cos(\theta)^2\frac{\partial^2f}{\partial r^2}+\frac{\cos(\theta)\sin(\theta)}{r^2}\frac{\partial f}{\partial\theta}-\frac{\cos(\theta)\sin(\theta)}{r}\frac{\partial^2f}{\partial r\partial\theta}\right)\\&+\left(\frac{\sin(\theta)^2}{r}\frac{\partial f}{\partial r}-\frac{\sin(\theta)\cos(\theta)}{r}\frac{\partial^2f}{\partial\theta\partial r}+\frac{\sin(\theta)\cos(\theta)}{r^2}\frac{\partial f}{\partial\theta}+\frac{\sin(\theta)^2}{r^2}\frac{\partial^2f}{\partial\theta^2}\right)\\=&\cos(\theta)^2\frac{\partial^2f}{\partial r^2}-2\frac{\cos(\theta)\sin(\theta)}{r}\frac{\partial^2f}{\partial r\partial\theta}+\frac{\sin(\theta)^2}{r^2}\frac{\partial^2f}{\partial\theta^2}\\&+\frac{\sin(\theta)^2}{r}\frac{\partial f}{\partial r}+2\frac{\cos(\theta)\sin(\theta)}{r^2}\frac{\partial f}{\partial\theta}\end{aligned}](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle%5Cbegin%7Baligned%7D%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+x%7D%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+x%7Df%3D%26%5Cleft%5B%5Ccos%28%5Ctheta%29%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+r%7D-%5Cfrac%7B%5Csin%28%5Ctheta%29%7D%7Br%7D%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial%5Ctheta%7D%5Cright%5D%5Cleft%28%5Ccos%28%5Ctheta%29%5Cfrac%7B%5Cpartial+f%7D%7B%5Cpartial+r%7D-%5Cfrac%7B%5Csin%28%5Ctheta%29%7D%7Br%7D%5Cfrac%7B%5Cpartial+f%7D%7B%5Cpartial%5Ctheta%7D%5Cright%29%5C%5C%3D%26%5Ccos%28%5Ctheta%29%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+r%7D%5Cleft%28%5Ccos%28%5Ctheta%29%5Cfrac%7B%5Cpartial+f%7D%7B%5Cpartial+r%7D-%5Cfrac%7B%5Csin%28%5Ctheta%29%7D%7Br%7D%5Cfrac%7B%5Cpartial+f%7D%7B%5Cpartial%5Ctheta%7D%5Cright%29-%5Cfrac%7B%5Csin%28%5Ctheta%29%7D%7Br%7D%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial%5Ctheta%7D%5Cleft%28%5Ccos%28%5Ctheta%29%5Cfrac%7B%5Cpartial+f%7D%7B%5Cpartial+r%7D-%5Cfrac%7B%5Csin%28%5Ctheta%29%7D%7Br%7D%5Cfrac%7B%5Cpartial+f%7D%7B%5Cpartial%5Ctheta%7D%5Cright%29%5C%5C%3D%26%5Cleft%28%5Ccos%28%5Ctheta%29%5E2%5Cfrac%7B%5Cpartial%5E2f%7D%7B%5Cpartial+r%5E2%7D%2B%5Cfrac%7B%5Ccos%28%5Ctheta%29%5Csin%28%5Ctheta%29%7D%7Br%5E2%7D%5Cfrac%7B%5Cpartial+f%7D%7B%5Cpartial%5Ctheta%7D-%5Cfrac%7B%5Ccos%28%5Ctheta%29%5Csin%28%5Ctheta%29%7D%7Br%7D%5Cfrac%7B%5Cpartial%5E2f%7D%7B%5Cpartial+r%5Cpartial%5Ctheta%7D%5Cright%29%5C%5C%26%2B%5Cleft%28%5Cfrac%7B%5Csin%28%5Ctheta%29%5E2%7D%7Br%7D%5Cfrac%7B%5Cpartial+f%7D%7B%5Cpartial+r%7D-%5Cfrac%7B%5Csin%28%5Ctheta%29%5Ccos%28%5Ctheta%29%7D%7Br%7D%5Cfrac%7B%5Cpartial%5E2f%7D%7B%5Cpartial%5Ctheta%5Cpartial+r%7D%2B%5Cfrac%7B%5Csin%28%5Ctheta%29%5Ccos%28%5Ctheta%29%7D%7Br%5E2%7D%5Cfrac%7B%5Cpartial+f%7D%7B%5Cpartial%5Ctheta%7D%2B%5Cfrac%7B%5Csin%28%5Ctheta%29%5E2%7D%7Br%5E2%7D%5Cfrac%7B%5Cpartial%5E2f%7D%7B%5Cpartial%5Ctheta%5E2%7D%5Cright%29%5C%5C%3D%26%5Ccos%28%5Ctheta%29%5E2%5Cfrac%7B%5Cpartial%5E2f%7D%7B%5Cpartial+r%5E2%7D-2%5Cfrac%7B%5Ccos%28%5Ctheta%29%5Csin%28%5Ctheta%29%7D%7Br%7D%5Cfrac%7B%5Cpartial%5E2f%7D%7B%5Cpartial+r%5Cpartial%5Ctheta%7D%2B%5Cfrac%7B%5Csin%28%5Ctheta%29%5E2%7D%7Br%5E2%7D%5Cfrac%7B%5Cpartial%5E2f%7D%7B%5Cpartial%5Ctheta%5E2%7D%5C%5C%26%2B%5Cfrac%7B%5Csin%28%5Ctheta%29%5E2%7D%7Br%7D%5Cfrac%7B%5Cpartial+f%7D%7B%5Cpartial+r%7D%2B2%5Cfrac%7B%5Ccos%28%5Ctheta%29%5Csin%28%5Ctheta%29%7D%7Br%5E2%7D%5Cfrac%7B%5Cpartial+f%7D%7B%5Cpartial%5Ctheta%7D%5Cend%7Baligned%7D&bg=e6e6e6&fg=333333&s=0&c=20201002)


After that it’s no trouble at all to transform the differential terms

Let’s just work out the component that goes with 
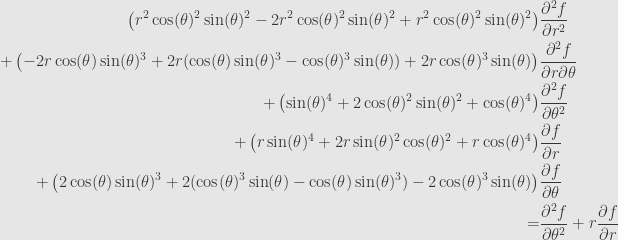
Which has an extraneous term! If an invariance rule held, we should just get 
The difference comes from the way that the differential operators themselves change as we move our point around. Increasing 

RSS Feeds

